Researchers at the University of Pennsylvania and the University of Michigan have achieved a groundbreaking feat in robotics, creating the smallest fully programmable autonomous robots ever developed. These microscopic marvels, barely visible to the naked eye, are capable of navigating through liquids, sensing their environment, making independent decisions, and operating for extended periods, all at an astonishing production cost of approximately one penny each. This revolutionary advancement opens up a new frontier in microscopic robotics, with profound implications for fields ranging from medicine to advanced manufacturing.
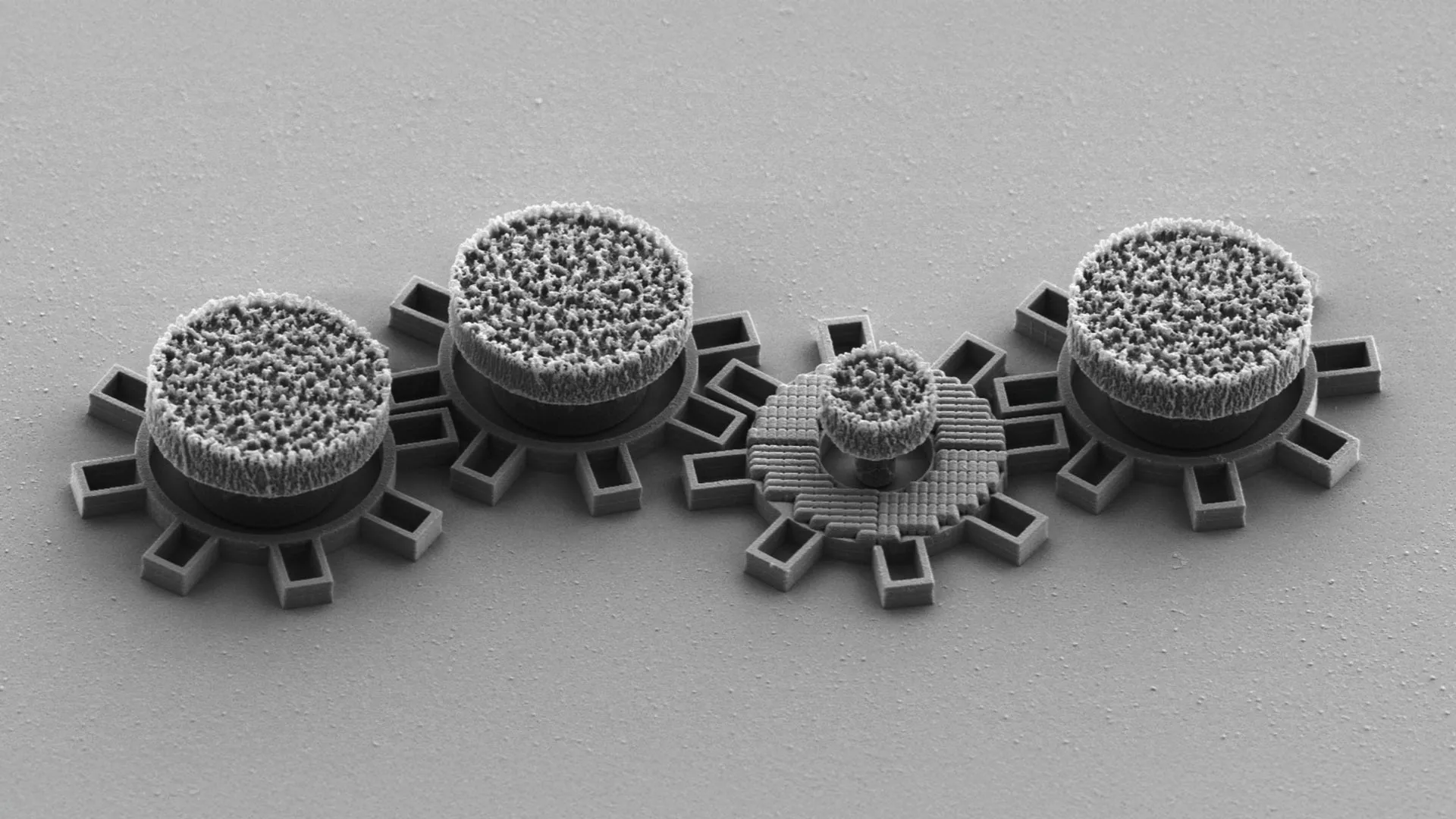
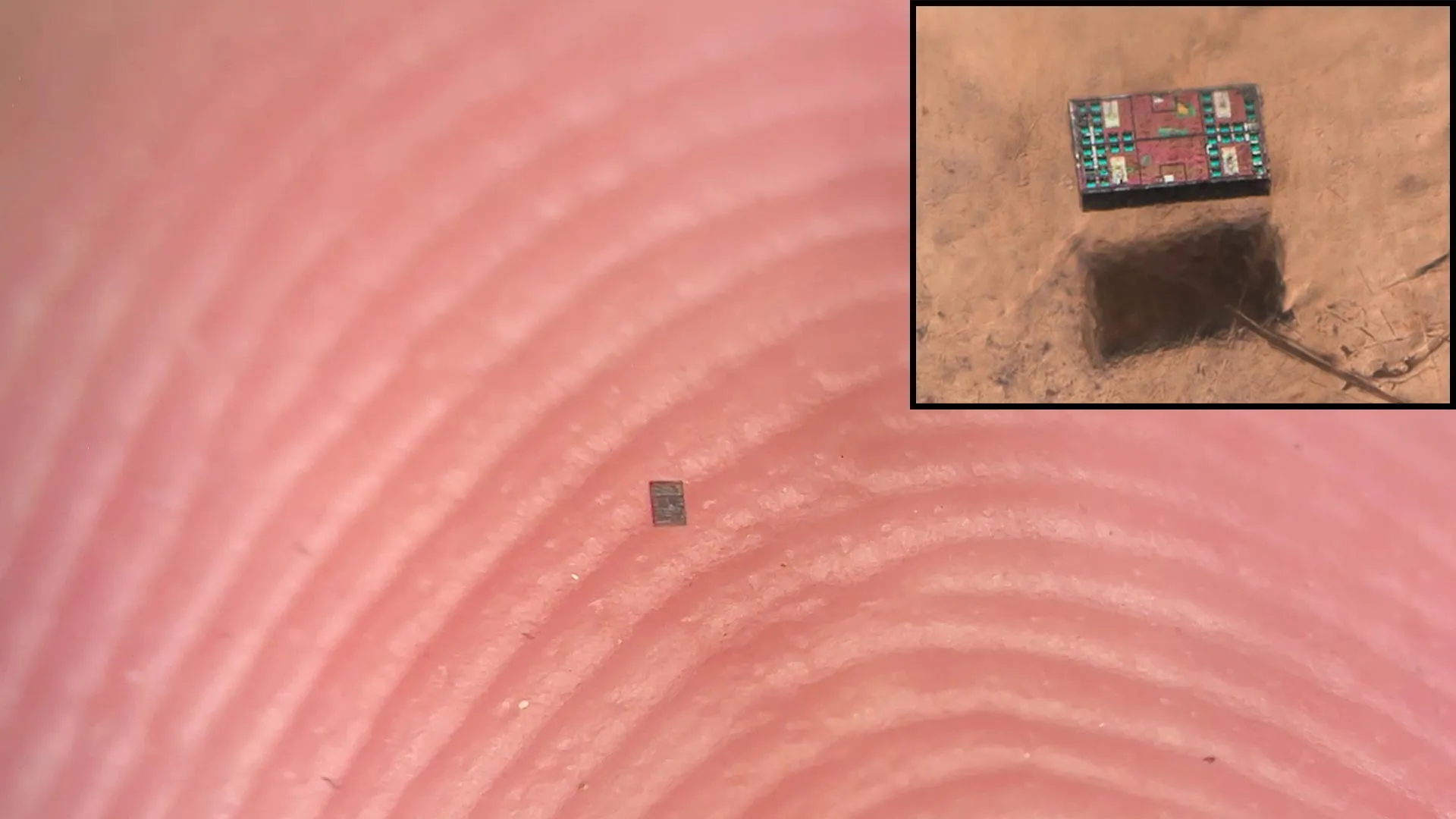
The diminutive robots measure roughly 200 by 300 by 50 micrometers, making them significantly smaller than a typical grain of salt. This scale is particularly significant as it matches the size of many microorganisms, suggesting their potential to interact with and monitor biological systems at a cellular level. Imagine doctors being able to deploy these tiny machines to observe individual cells within the human body, providing unprecedented diagnostic capabilities. Beyond healthcare, these robots could revolutionize micro-assembly processes, enabling engineers to construct incredibly intricate devices used in cutting-edge manufacturing.
A key innovation is the robots’ complete autonomy, powered entirely by light. Embedded within their microscopic frames are miniature computers that grant them the ability to follow pre-programmed paths, detect subtle changes in local temperature, and dynamically adjust their movement in response to these environmental cues. This level of independent operation is a significant departure from previous microscopic machines, which often relied on external forces like magnetic fields or physical tethers.
The research, published in prestigious journals such as Science Robotics and Proceedings of the National Academy of Sciences (PNAS), highlights the first truly autonomous and programmable robots at this minuscule scale. Professor Marc Miskin of Penn Engineering, the senior author of the studies, emphasizes the magnitude of this achievement: "We’ve made autonomous robots 10,000 times smaller. That opens up an entirely new scale for programmable robots." This advancement addresses a long-standing challenge in robotics: achieving independent functionality at sizes below one millimeter.
The difficulty in shrinking robots has been a persistent hurdle for decades. While electronics have steadily decreased in size, the principles of robotics have not translated as easily. Miskin explains that at everyday scales, forces like gravity and inertia, which depend on volume, govern motion. However, at the microscopic level, surface forces, particularly drag and viscosity, become overwhelmingly dominant. "If you’re small enough, pushing on water is like pushing through tar," Miskin illustrates, underscoring the fundamental shift in physics that engineers must contend with.
Traditional robotic designs, with articulated limbs like arms or legs, prove impractical at these microscopic dimensions. Such tiny appendages are prone to breaking easily and are exceedingly difficult to manufacture. "Very tiny legs and arms are easy to break," Miskin notes. "They’re also very hard to build." To circumvent these limitations, the research team devised an entirely novel propulsion system that harnesses the physics of the microscopic world rather than fighting against it.
Instead of mimicking the swimming of larger organisms, which typically involves pushing water backward through physical exertion, these microscopic robots employ a unique electrokinetic method. They generate an electrical field that subtly pushes charged particles within the surrounding liquid. As these ions move, they drag nearby water molecules, creating a localized flow of fluid around the robot, propelling it forward. "It’s as if the robot is in a moving river," Miskin explains, "but the robot is also causing the river to move." By precisely controlling this electrical field, the robots can alter their direction, navigate complex trajectories, and even synchronize their movements in coordinated groups, reminiscent of schools of fish. They can achieve speeds equivalent to one body length per second.
This light-powered swimming mechanism, devoid of any moving parts, contributes to the robots’ remarkable durability. They can be transferred between different liquid environments multiple times using a micropipette without sustaining damage. Furthermore, powered by an LED light source, these robots can maintain their operational capability for months, offering sustained functionality for various applications.
The journey to true autonomy, however, extends beyond mere locomotion. It necessitates the integration of sensing, decision-making, and power management into an incredibly compact form factor – a chip measuring a fraction of a millimeter. This crucial aspect of the project was spearheaded by David Blaauw’s team at the University of Michigan. Blaauw’s lab, already renowned for developing the world’s smallest computer, found an ideal synergy with Penn Engineering’s propulsion system. "We saw that Penn Engineering’s propulsion system and our tiny electronic computers were just made for each other," Blaauw states, recalling their pivotal meeting at a DARPA presentation five years prior. Translating this vision into a functional robot required five years of intensive development.
A significant challenge was managing power. The miniature solar panels on the robots generate a mere 75 nanowatts of power, a minuscule fraction of what even a smartwatch consumes. To overcome this, the team engineered specialized circuits that operate at extremely low voltages, achieving a remarkable power consumption reduction of over 1000 times. Space constraints were equally demanding, with the solar panels occupying a substantial portion of the robot’s surface, leaving minimal room for computational hardware. This led to a radical redesign of the robot’s software architecture. "We had to totally rethink the computer program instructions," Blaauw elaborates, "condensing what conventionally would require many instructions for propulsion control into a single, special instruction to shrink the program’s length to fit in the robot’s tiny memory space."
These combined advancements have culminated in what the researchers believe to be the first sub-millimeter robot capable of genuine decision-making. The integration of a complete computer system, including a processor, memory, and sensors, into a robot of this size is unprecedented. This allows the robots to perceive their surroundings and react independently.
The robots are equipped with electronic temperature sensors that can detect changes as subtle as one-third of a degree Celsius. This sensitivity enables them to navigate towards warmer areas or to report temperature readings that can serve as indicators of cellular activity, offering a powerful new tool for monitoring individual cells.
Communicating these temperature measurements required an ingenious solution. "To report out their temperature measurements, we designed a special computer instruction that encodes a value, such as the measured temperature, in the wiggles of a little dance the robot performs," Blaauw explains. "We then look at this dance through a microscope with a camera and decode from the wiggles what the robots are saying to us. It’s very similar to how honey bees communicate with each other."
The same light that powers the robots also serves as their programming interface. Each robot possesses a unique address, allowing researchers to upload distinct instructions to individual units. "This opens up a host of possibilities," Blaauw adds, "with each robot potentially performing a different role in a larger, joint task."
These current iterations represent just the initial phase of development. Future versions are envisioned with enhanced programming capabilities, increased speed, additional sensor types, and the ability to operate in more challenging environments. The researchers have deliberately designed the system as a flexible platform, integrating a robust propulsion mechanism with cost-effective, adaptable electronics.
"This is really just the first chapter," Miskin concludes. "We’ve shown that you can put a brain, a sensor and a motor into something almost too small to see, and have it survive and work for months. Once you have that foundation, you can layer on all kinds of intelligence and functionality. It opens the door to a whole new future for robotics at the microscale."
The groundbreaking research was a collaborative effort involving the University of Pennsylvania’s School of Engineering and Applied Science and School of Arts & Sciences, alongside the University of Michigan’s Department of Electrical Engineering and Computer Science. Funding for this pioneering work was provided by the National Science Foundation (NSF 2221576), the University of Pennsylvania Office of the President, the Air Force Office of Scientific Research (AFOSR FA9550-21-1-0313), the Army Research Office (ARO YIP W911NF-17-S-0002), the Packard Foundation, the Sloan Foundation, and the NSF National Nanotechnology Coordinated Infrastructure Program (NNCI-2025608), which supports the Singh Center for Nanotechnology, along with Fujitsu Semiconductors.
Additional contributing authors to this significant research include Maya M. Lassiter, Kyle Skelil, Lucas C. Hanson, Scott Shrager, William H. Reinhardt, Tarunyaa Sivakumar, and Mark Yim from the University of Pennsylvania, and Dennis Sylvester, Li Xu, and Jungho Lee from the University of Michigan.